Small software tips, part 2
2024-08-10
Some small software tips, with a bias towards python and robotics. They are mostly style suggestions for maintainability of code, and not solutions to problems. These are collected from personal experience, but I don't take credit for them. I learned by working with engineers better than myself. When I need an example application, I will consider software for an aerial drone that performs deliveries.
Contents
Exceptions
Handling non-happy paths can take a lot of effort. Exception handling can be like the underworld of software: not immediately visible but pervasive (by making the comparison, I don't mean that it should be messy). For software that needs to be robust, every line might need to be scrutinized, and every feature addition can raise new errors.
Adding exceptions
When raising a new exception, spare a thought for calling code that might need to handle it. Add code to catch the exception, or just bring it to the notice of other engineers.
Raise a specific exception instead of generic ones that might have more than one
cause. For example, suppose our robot has multiple sensors, and the Perception
class stores a dictionary mapping sensor names to objects.
class Perception:
def get_sensor_by_name(self, name):
return self._sensors[name]
If called with a name that doesn't exist, we will likely get the built-in
KeyError. In a large codebase, where the KeyError could have more than one
source, it might be more informative to raise a custom exception.
class UnknownSensor(Exception):
pass
class Perception:
def get_sensor_by_name(self, name):
if name not in self._sensors:
raise UnknownSensor(f"No sensor named {name}")
The tip also applies to external modules. Suppose we are using a communication
library which defines a ConnectionError. Defining sensor-specific errors can
help calling code identify which sensor is misbehaving.
For code that is a component of larger software,
- start with a single exception,
- refine into variants as needed,
- define variants as children of a base exception.
For example
class SensorException(Exception):
""" Base class for sensor exceptions. """
class InvalidSensorRequest(SensorException):
""" Request for data was not well-formed. """
class SensorCrashed(SensorException):
""" Could not return data because sensor died. """
Refine into variants when error handling is different.
def construct_map():
try:
get_sensor_data()
except InvalidSensorRequest:
# could fix request and retry
except SensorCrashed:
# could wait for sensor to restart
Catching the base exception is useful for calls that don't care about variants.
def execute_hairpin_turn():
try:
get_sensor_data()
except SensorException:
# abort motion and safely come to a stop
Catching exceptions
The first tip is to keep code readable. It is sad to see a block of well-written
code summarily shoved inside a try. It is also hard to read nested
try-except blocks like below.
# try within a try
try:
try:
...
# try within an except
try:
...
except:
try:
...
Stack traces are very useful, but also tiring to wade through. Log a stack trace from an exception only once to minimize noise.
Where should exceptions be caught? I will sketch out two patterns, but leave out
a discussion of how to choose one. The first option is to catch an exception
closest to a statement. This makes it clear to readers where the error can be
raised, and surrounding lines are saved an indent level. In the snippet below,
the except SensorException only wraps the call that can raise the exception.
def execute_docking():
communicate_with_platform()
fly_above_platform()
try:
detect_platform()
except SensorException:
...
descend_to_platform()
The second is higher up in the stack. This can save lines of code if multiple sub-calls raise the same exception which would be handled the same way.
def finish_mission():
try:
execute_docking()
except TrajectoryFailedToComplete:
# One except instead of two identical try-except blocks around:
# - fly_above_platform
# - descend_to_platform
...
In the limit, a majority of exceptions are caught high up in the call stack.
def perform_mission():
while continue_mission:
try:
attempt_mission()
except SensorException:
...
except TrajectoryFailedToComplete:
...
def attempt_mission():
prepare_mission()
perform_delivery()
finish_mission()
The advantages are a separation of main logic from error handling, and a
convenient catalog of errors. Note the ladder of except blocks. A possible bug
is that an earlier except aliases a later one.
try:
...
except Exception:
...
except ValueError:
# will never be reached
If recovery behavior for a particular exception is involved, it can be spun out
into its own function (which can be unit tested). This can help avoid try
statements nested inside except blocks, which can occur when exception
handling can itself encounter an exception.
def construct_map():
try:
get_sensor_data()
except SensorCrash:
sensor_crash_recovery()
def sensor_crash_recovery():
# Check that this call is valid, by examining the error type:
# - either pass in the error,
# - or ensure an error stack is active.
try:
wait_for_sensor()
except TimeoutError:
# stop waiting and give up
Exception trail
In software with many layers, the journey of an exception can be arduous, traveling across processes and components. Suppose a user requests a drone delivery, but the mission fails because of an unrecoverable sensor crash. The path of the exception might be
- sensor driver,
- perception software,
- mission software,
- scheduling software,
- error message to user.
The exception might even change format along this trail, such as a conversion to
a string code. Avoid changing the name, e.g. SensorCrash to
UNRECOVERABLE_SENSOR_FAILURE.
Alongside a software trail, the exception might have an audience trail:
- perception engineers,
- other software engineers,
- live support engineers,
- the final user.
Error messages associated with an exception are important and depend on the audience. A perception engineer might want gory details of the crash, a support engineer would benefit from suggestions to resolve the issue, and the user only needs a brief and clear message.
At earlier levels in software, we might like refined exceptions for fine-grained handling. But further along the audience trail, we should seek to suppress or consolidate exceptions, and simplify error messages.
Levels of configuration
Software might need to support numerous levels of configuration. Consider a
parameter like minimum_landing_area used in find_landing_zone. To start
with, it might be a constant defined at the top of a file. This allows it to be
imported and used in other code (say in analysis).
# Prefer named constants to magic numbers, which are
# undocumented numbers floating around in code.
MINIMUM_LANDING_AREA = 1.5
def find_landing_zone():
# make use of MINIMUM_LANDING_AREA
Class-level constants work too. The parameter can then be made an argument, allowing callers to change the value.
MINIMUM_LANDING_AREA = 1.5
def find_landing_zone(minimum_landing_area=None):
if minimum_landing_area is None:
minimum_landing_area = MINIMUM_LANDING_AREA
# make use of minimum_landing_area
Assume that a Perception object calls the
function, and stores the parameter value to use.
class Perception:
def __init__(self, minimum_landing_area=None):
self._minimum_landing_area = minimum_landing_area
def landing():
find_landing_zone(minimum_landing_area=self._minimum_landing_area)
A next level of configuration is to store values in a configuration file, to be read during object creation. A use case is different hardware: we might have a smaller drone, and the configuration file for it could specify a smaller landing area.
def create_perception(config):
"""
:param dict config: configuration read from a file
"""
return Perception(
minimum_landing_area=config.get("minimum_landing_area")
)
Further, we can allow commandline args to override a configuration file. A use case is for test engineers to temporarily modify a value.
def create_perception(cmdline_args, config):
"""
:param dict cmdline_args: commandline args
:param dict config: configuration read from a file
"""
if "minimum_landing_area" in cmdline_args:
minimum_landing_area = cmdline_args["minimum_landing_area"]
elif "minimum_landing_area" in config:
minimum_landing_area = config["minimum_landing_area"]
else:
minimum_landing_area = None
return Perception(minimum_landing_area=minimum_landing_area)
Finally, the parameter may be modified online by higher-level software. Assume that a scheduling software hands out missions to drones. The parameter value it assigns can have highest priority.
@dataclass
class Mission:
minimum_landing_area: Optional[float] = None
class Perception:
def landing(self, mission):
find_landing_zone(
minimum_landing_area=(
mission.minimum_landing_area or self._minimum_landing_area
)
)
The scheduler has a broader worldview. It might detect that weather conditions are particularly windy in an area, and override the parameter to use a larger, conservative value.
Logging
Logging decisions made is crucial for debugging. As an example, consider the following drone docking code, where we might want to log details of each step.
def execute_docking():
communicate_with_platform()
fly_above_platform()
detect_platform()
descend_to_platform()
The logging approach should be robust to errors that can be raised. For example,
if a SensorException occurs with detect_platform, we should still log
partial progress (the success of prior steps), and possibly the sensor exception.
The logging approach should maintain readability, e.g. avoid introducing
numerous try blocks just to aid logging.
Logging operations should not affect live software. They should be fast. What about handling logging errors, such as database or connection issues? Consider two options.
- We can interrupt or fail the mission, but preserve logs as far as possible, including issues with logging itself.
- We can complete the mission successfully, but lose logs.
The answer could depend on the stage of development (adding yet more configuration complexity).
- We might choose option 1 early on, when we want to expose and fix all errors.
- We might choose option 2 after deployment, when completing missions is higher priority.
Prefer logging by addition-only, rather than modifying prior logs. For example,
- suppose there was an array of platforms,
- a drone docked to an invalid one,
- which it realized, and then re-docked to a valid platform.
Instead of maintaining a single log for the docking operation, which contains the result of the final successful maneuver, prefer maintaining logs for each docking attempt, including failed ones. Not only is this more informative, it is simpler than looking up the single log and determining how to correctly update it.
Logging by publishing events to a stream can address these requirements, at the cost of being potentially harder to implement, than say logging directly to a database.
Documentation
When adding code for a new algorithm, commit a small script showing how to run it. This can be as effective documentation as a separate how-to wiki page.
Unit tests are a great kind of documentation and tutorial of features, especially if they build up from simple to complex tests.
Source code documentation should be required for 'incantations', the kind of
magic that can show up when using libraries like re (regex) or pandas. It is
fine if someone wants to compress a lot of cleverness into a single line, but it
should at least be well-explained.
Removing code
Dead code creeps in over time when multiple engineers contribute to a large file. Small examples of such code that can be removed are:
- unused
imports, - unused variables, and arguments,
exceptblocks for unused errors.
More insidious are lines that do not affect correctness, but make code inefficient, e.g. unnecessary locks, database saves, or state synchronization. It is easy for a developer to add the use of a lock with the justification that it can't possibly hurt. But allow many of these to accumulate, and it can become difficult to reason about which of them are minimal for correct operation.
If we remove the use of a feature from an application, we can still keep around
the feature's source code for reference. As an example, suppose that an earlier
version of the drone used a bluetooth sensor to detect if the docking platform
was nearby. Suppose that the sensor was then removed because it was found to be
redundant. We could remove the bluetooth_sensor instance variable from our
Perception class, while keeping around the perception/bluetooth.py file.
There might be good reasons to remove the source code as well though. The unused source code can be a distraction by showing up in code search tools. Deleting it can free up valuable names/ namespaces, which can then be occupied by more recent code. We can always add a tag to the repository for the option of checking out old code.
Code review
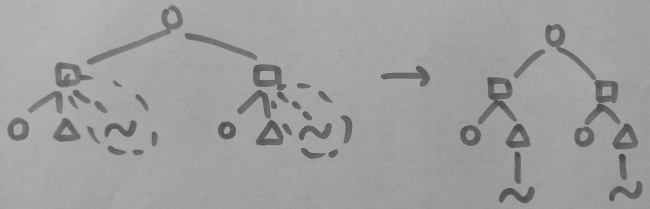
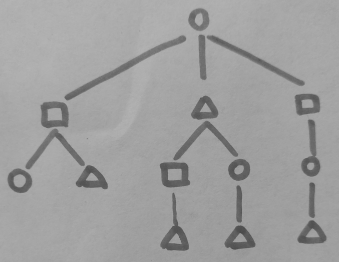
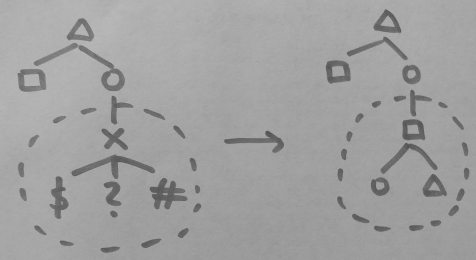
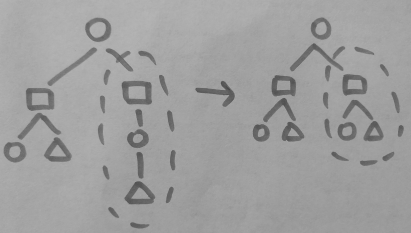
I loosely picture code that needs to be reviewed as a tree: something that needs to be maintained, grown, and pruned.
Engineers working on some software might not have the full picture. They might zoom into their area of interest and make changes that get the job done, but don't fit overall style. A task of code review is to make such changes consistent with existing code.
Consistency can be a valuable property of code that many developers contribute to. In our drone example, perception engineers might have figured out a good data access pattern to avoid race conditions. This can be followed when writing software for a new sensor, or more broadly in the codebase. Or we might note that drone docking and take-off involve similar operations, and refactor code so that they appear symmetric.
Software can accumulate numerous features over time. Having an overall picture
helps avoid clutter by adding features at an appropriate depth in code, hidden
from the main flow of logic. For example, we might add a machine learning
component to add semantic labels to a map. Instead of introducing a
semantic_labeler object everywhere in the mission code, we can choose to push
it down inside a construct_map() function call.